Concurso:
SEED-PR
Disciplina:
Engenharia Eletrônica
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
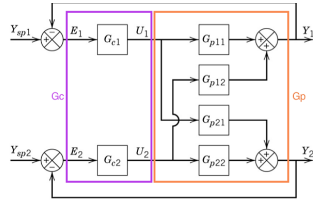
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica:
