Concurso:
SEAD-AP
Disciplina:
Engenharia Eletrônica
Um servossistema contínuo, linear e invariante no tempo, modelado em espaço de estados, tendo X(t) como vetor de estados, apresenta sua dinâmica ditada pelas equações a seguir, em que  é a derivada do vetor de estados, y(t) é a saída e u(t) é a entrada.
é a derivada do vetor de estados, y(t) é a saída e u(t) é a entrada.
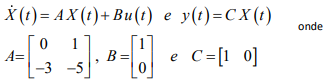
Utilizando-se uma realimentação de Estados com a lei de controle dada por: , em que K é o vetor de ganhos e r(t) é uma entrada de referência, pretende-se alocar seus dois polos de malha fechada nas posições reais
, em que K é o vetor de ganhos e r(t) é uma entrada de referência, pretende-se alocar seus dois polos de malha fechada nas posições reais 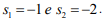 Para obter esse resultado, o valor do vetor de ganhos K é:
Para obter esse resultado, o valor do vetor de ganhos K é:
é a derivada do vetor de estados, y(t) é a saída e u(t) é a entrada. Utilizando-se uma realimentação de Estados com a lei de controle dada por:
, em que K é o vetor de ganhos e r(t) é uma entrada de referência, pretende-se alocar seus dois polos de malha fechada nas posições reais Para obter esse resultado, o valor do vetor de ganhos K é: 