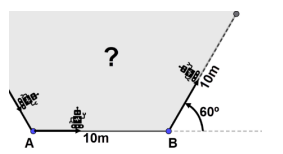
Inicialmente, um robô se encontrava em um ponto A do plano cartesiano. Ele caminhou 10 metros em linha reta e parou em um ponto B. Sobre o ponto B, ele fez um giro de 60º no sentido anti-horário, em torno de seu próprio eixo e, em seguida caminhou em linha reta por mais 10 metros. Ele repetiu essa sequência mais algumas vezes, até o instante em que retornou ao ponto inicial A. A figura a seguir apresenta diferentes momentos do movimento do robô.
A medida da área da região limitada pela trajetória do robô, em metro quadrado, é mais próxima de
A medida da área da região limitada pela trajetória do robô, em metro quadrado, é mais próxima de
