Questões de Concurso
Filtrar
36 Questões de concurso encontradas
Página 1 de 8
Questões por página:
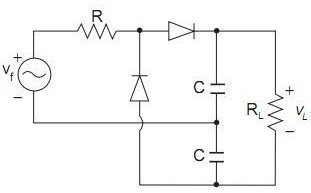
No circuito mostrado na figura acima, os diodos são considerados ideais e a tensão Vf aplicada é senoidal. Considerando a disposição dos componentes no circuito e suas polaridades, a saída VL será uma tensão
A Figura 1 ilustra um disco onde ficam doze carretéis igualmente espaçados (foram representados na figura apenas dois carretéis). Com a rotação do disco, os carretéis vão sendo desfiados, fazendo uma trança no cordel detonante, que atravessa o furo central do disco. O disco gira impulsionado por um motor trifásico comandado por um contator K. Liga-se o sistema com a botoeira L e desliga-se com a botoeira D. A rotação do disco é monitorada pelo sensor indutivo M e a passagem do fio é detectada pelo sensor óptico O. Em função do balanceamento mecânico do disco, o sensor indutivo detecta a passagem de dois ressaltos durante a rotação. Assim, numa rotação, em condições normais, devem ser observados dois pulsos em M e doze pulsos em O. A linha diametral dos ressaltos não está alinhada com as linhas diametrais dos carretéis e a velocidade de rotação do disco é tal que a janela temporal entre quaisquer dos pulsos de M ou de O é muito maior que o tempo de varredura do CLP. As especificações são que o disco deve ser parado quando se detecta o arrebentamento de um fio e que o sistema deve ser capaz de funcionar independente da posição inicial do disco.
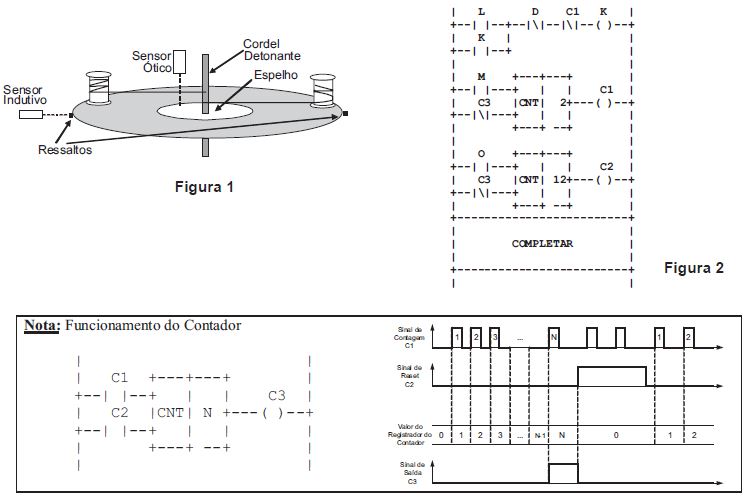
Foi desenvolvido um programa em LADDER para controle do sistema, mostrado parcialmente na Figura 2. A linha que completa corretamente o programa da Figura 2 é
Os CLPs da Figura 1 estão conectados numa rede do tipo mestre-escravo. O CLP mestre M realiza uma varredura cíclica a todos os CLPs escravos Ei (i =1..n) para realizar o intercâmbio de dados. A comunicação por rede permite que os CLPs compartilhem variáveis. O ciclo de varredura da rede é independente do ciclo de varredura interno dos CLPs, este composto por três etapas: (i) atualização da memória de entrada e saída local; (ii) atualização da memória de dados referentes à rede; e (iii) execução do programa de aplicação do usuário. Na etapa (ii), os dados recebidos por uma comunicação de rede são atualizados na memória interna e os dados referentes aos outros CLPs são repassados para transmissão. O intercâmbio de dados entre diferentes estações escravas Ei é feito por intermédio do CLP mestre M.

Numa comunicação escravo-escravo, ilustrada na Figura 2, o CLP E1 recebe um estímulo na entrada correspondente ao ponto X11, que atualiza o ponto C01 do CLP M e que, conseqüentemente, provoca uma modificação no ponto C21 do CLP E2. Considere que os tempos de varredura dos CLPs M, E1 e E2 sejam todos de 50ms, que o tempo requerido para completar a transmissão na rede seja de 20ms, e desconsidere o tempo necessário para a percepção de um estímulo na entrada de um CLP. O tempo mínimo, em milissegundos, em que um sinal conectado à entrada correspondente ao ponto X11 deve permanecer num determinado estado para que este seja percebido no ponto C21 é
Um sistema dinâmico em malha fechada pode ser modelado sob a forma de espaço de estado através das seguintes equações: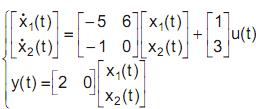
As posições dos pólos no plano s da função de transferência deste sistema são
Um determinado sistema físico pode ser modelado através da seguinte equação diferencial ordinária:
onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) =  deste sistema é
deste sistema é
