Questões de Concurso
Filtrar
868 Questões de concurso encontradas
Página 29 de 174
Questões por página:
Questões por página:
Concurso:
Grupo Hospitalar Conceição (GHC) - RS
Disciplina:
Engenharia Eletrônica
Um equipamento possui duas fontes independentes, uma para o circuito eletrônico, outra para energizar um motor CC de 6V de alimentação. Durante a montagem do equipamento, notou-se a falta da fonte DC do motor, e então, foi utilizada uma fonte disponível de 12V. Nessas condições, assinale a alternativa correta.
Concurso:
Grupo Hospitalar Conceição (GHC) - RS
Disciplina:
Engenharia Eletrônica
Um motor monofásico está ligado diretamente a uma fonte de tensão de corrente alternada de 200V/0º e a potência consumida é de S = 1k√2 W + 1k√2 V Ar. Determine o fator de potência e a corrente circulante na carga.
Concurso:
Grupo Hospitalar Conceição (GHC) - RS
Disciplina:
Engenharia Eletrônica
A montagem da Figura 6 foi realizada às pressas por um estagiário.
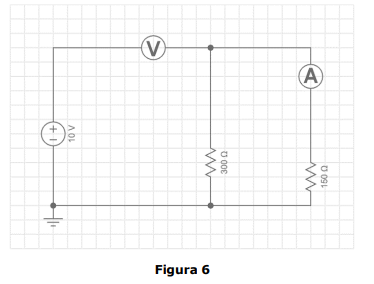
Quais seriam as leituras esperadas nos instrumentos de medida voltímetro e amperímetro, respectivamente?
Concurso:
Grupo Hospitalar Conceição (GHC) - RS
Disciplina:
Engenharia Eletrônica
Sobre as orientações básicas de segurança em laboratório, pode-se afirmar que:
I. Não existe nenhuma recomendação ou norma que estabeleça o tipo de calçado a ser utilizado no laboratório, permitindo-se inclusive sandálias, contanto que estejam sendo usadas meias longas e grossas. II. É proibido comer, beber ou fumar no interior dos laboratórios. III. Durante realização de atividade em laboratório, é vedado o uso de adornos pessoais (relógio, aliança, correntes, piercing, etc.).
Quais estão corretas?
I. Não existe nenhuma recomendação ou norma que estabeleça o tipo de calçado a ser utilizado no laboratório, permitindo-se inclusive sandálias, contanto que estejam sendo usadas meias longas e grossas. II. É proibido comer, beber ou fumar no interior dos laboratórios. III. Durante realização de atividade em laboratório, é vedado o uso de adornos pessoais (relógio, aliança, correntes, piercing, etc.).
Quais estão corretas?
Concurso:
Grupo Hospitalar Conceição (GHC) - RS
Disciplina:
Engenharia Eletrônica
Observe o circuito da Figura 5, que se encontra incialmente descarregado e com a chave S1 aberta e analise as assertivas abaixo: 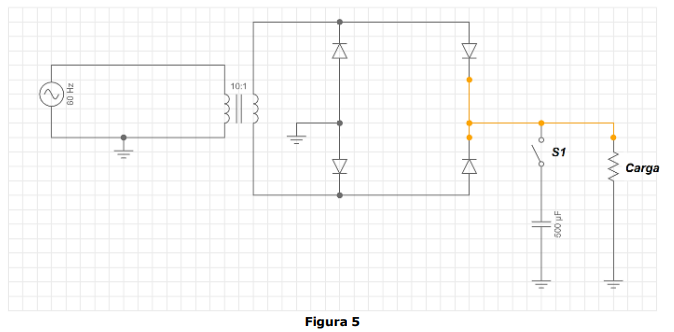
I. Trata-se de um circuito oscilador, aplicando sinal senoidal sobre a carga. II. Trata-se de um retificador de meia onda. III. A chave S1, quando fechada, irá reduzir o ripple de tensão sobre a carga. IV. Trata-se de um retificador de onda completa em ponte.
Quais estão corretas?
I. Trata-se de um circuito oscilador, aplicando sinal senoidal sobre a carga. II. Trata-se de um retificador de meia onda. III. A chave S1, quando fechada, irá reduzir o ripple de tensão sobre a carga. IV. Trata-se de um retificador de onda completa em ponte.
Quais estão corretas?
