Questões de Concurso
Filtrar
741 Questões de concurso encontradas
Página 146 de 149
Questões por página:
Nos cinco mapas de polos e zeros, nos quais “x” representa polos e “o” representa zeros de diferentes funções de transferência de sistemas de controle, o eixo horizontal representa o eixo real, e o eixo vertical, o eixo imaginário.
Sendo assim, qual dos sistemas representados é BIBO (Bounded Input Bounded Output) estável?
A Figura abaixo mostra um diagrama de fluxo de sinal que representa as equações simultâneas que descrevem um sistema de controle.
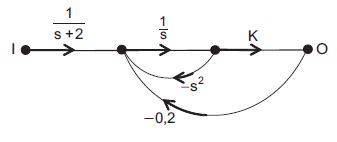
Sabendo-se que K é uma constante, qual é a função de transferência H(s) = O(s) / I(s) representada por esse diagrama?
Esse worm se disseminava através de mídias removíveis do tipo pen-drive e somente naqueles computadores que executavam o sistema operacional Windows. Após a infecção, o worm verificava se o equipamento fazia parte de uma planta do sistema SCADA e, em caso afirmativo, alterava uma biblioteca dll do sistema que, mais tarde, danificaria as centrífugas-alvo.
Considerando-se as informações descritas acima, esse worm recebeu o nome de
Os polos, representados por (x), e os zeros, representados por (o), de uma função de transferência podem ser distribuídos em um mapeamento chamado de diagrama do lugar das raízes. O eixo horizontal representa o eixo real, e o vertical, o imaginário. A Figura abaixo mostra um diagrama onde estão localizados um zero e quatro polos da função de transferência de um dado sistema de controle.
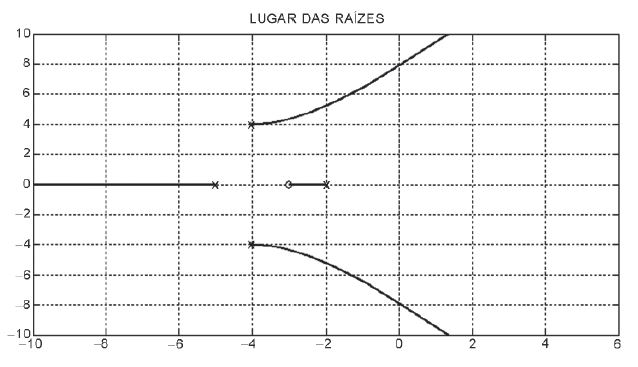
Qual é a função de transferência H(s) que representa o sistema de controle investigado?
O critério de estabilidade de Routh é determinado em função das raízes da equação característica da equação diferencial que rege o sistema e que representa os polos da função de transferência.
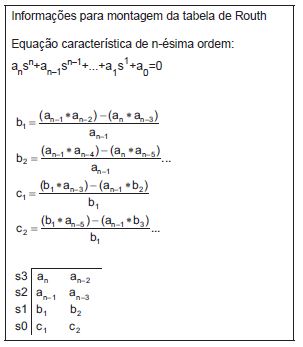
Assim, dada a equação característica, representada pelo polinômio p(s) =2s3 +2s2 +3s+6, verifica-se que, pelo critério da estabilidade, o sistema é
