Questões de Concurso
Filtrar
34 Questões de concurso encontradas
Página 4 de 7
Questões por página:
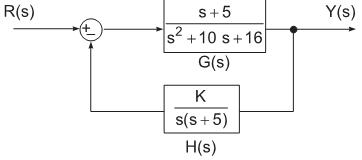
A figura acima mostra uma estrutura de controle em malha fechada, onde G(s) corresponde a uma planta que se deseja controlar com uma realimentação de saída através de um compensador H(s).
Com base no diagrama, a função de transferência de malha fechada é
Um sistema com sinais x(t) de entrada e y(t) de saída tem sua dinâmica modelada pela seguinte equação diferencial:
A função de transferência que liga a saída Y(s) à entrada X(s) é
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s³ + 12 s² + 44 s + 48 + K.
Variando positivamente o valor de K até o sistema entrar em oscilação pura (limiar da instabilidade), o valor da frequência de oscilação, em rad/s, é
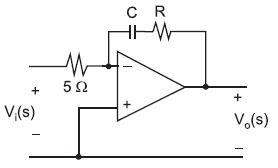
O circuito da figura acima é composto por um amplificador operacional considerado ideal. Para que a função de transferência desse circuito seja  , os valores de R, em O, e C, em F, devem ser, respectivamente
, os valores de R, em O, e C, em F, devem ser, respectivamente
