Filtrar
87 Questões de concurso encontradas
Página 1 de 18
Questões por página:
Questões por página:
Concurso:
Copergás - PE
Disciplina:
Engenharia Eletrônica
mostrar texto associado
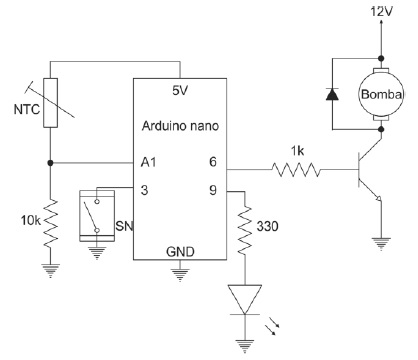
Considere o trecho genérico de fluxograma que pode ser usado no código (sketch) do sistema, conforme a seguir. 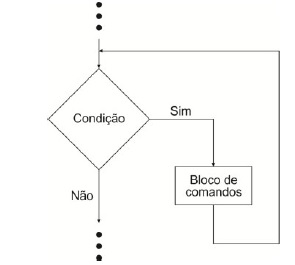
A estrutura de controle que ele representa é:
A estrutura de controle que ele representa é:
Concurso:
EMGEPRON
Disciplina:
Engenharia Eletrônica
O controle PD consegue amortecer a resposta de um sistema atuando no(a):
Concurso:
EMGEPRON
Disciplina:
Engenharia Eletrônica
Em um sistema de controle PID, quando há erro, mas não há variação do erro, a parcela D:
Concurso:
EMGEPRON
Disciplina:
Engenharia Eletrônica
No controle PID, pode-se falar que, em relação ao sinal processado, o termo I está sempre relacionado com o(a):
Concurso:
Correios
Disciplina:
Engenharia Eletrônica
Considere um circuito RLC série com R=20 Ω, L=0,5 H e C=50 μF. Se a resposta do circuito é subamortecida, o fator de amortecimento ζ é dado por ______. Assinale a alternativa que preencha corretamente a lacuna.
