Questões de Concurso
Filtrar
61 Questões de concurso encontradas
Página 4 de 13
Questões por página:
Questões por página:
Concurso:
ABIN
Disciplina:
Engenharia Eletrônica
mostrar texto associado
Uma possível implementação de um controlador PID pode ser corretamente realizada pelo circuito mostrado na figura abaixo, utilizando-se amplificadores operacionais, resistores, potenciômetros e capacitores. O ganho, a constante de tempo integral, a constante de tempo derivativo e o polo para eliminação de ganho em altas frequências são ajustados como  , respectivamente.
, respectivamente.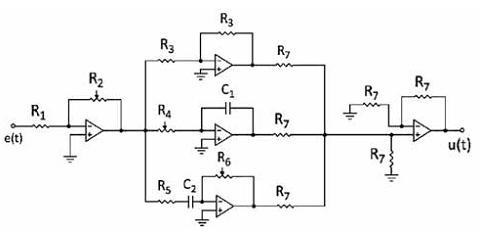
Concurso:
ABIN
Disciplina:
Engenharia Eletrônica
mostrar texto associado

Em regime permanente, a amplitude do sinal de saída é dada por y(t → ∞ ) =  V.
V.
Concurso:
ABIN
Disciplina:
Engenharia Eletrônica
mostrar texto associado
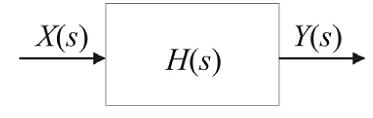
A função de transferência do sistema é determinada pela relação H (s) = 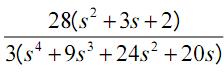 , em que s é a frequência complexa.
, em que s é a frequência complexa.
Concurso:
ABIN
Disciplina:
Engenharia Eletrônica
mostrar texto associado
O sinal de saída é limitado para operação que requeira sinal de entrada em corrente contínua.
Concurso:
Banco da Amazônia
Disciplina:
Engenharia Eletrônica
mostrar texto associado
A estabilidade de sistemas dinâmicos discretos é determinada pela posição dos polos da função de transferência desse sistema no plano complexo Z. Se todos os polos da função de transferência estiverem no interior do círculo unitário, o sistema é estável. No entanto, se houver algum polo da função de transferência fora do círculo unitário, o sistema é instável.
